1. Komponen [kembali]
1. Arduino Uno

Arduino Uno adalah board mikrokontroler berbasis ATmega328 (datasheet). Memiliki 14 pin input dari output digital dimana 6 pin input tersebut dapat digunakan sebagai output PWM dan 6 pin input analog, 16 MHz osilator kristal, koneksi USB, jack power, ICSP header, dan tombol reset. Untuk mendukung mikrokontroler agar dapat digunakan, cukup hanya menghubungkan Board Arduino Uno ke komputer dengan menggunakan kabel USB atau listrik dengan AC yang-ke adaptor-DC atau baterai untuk menjalankannya.
2. Motor Driver
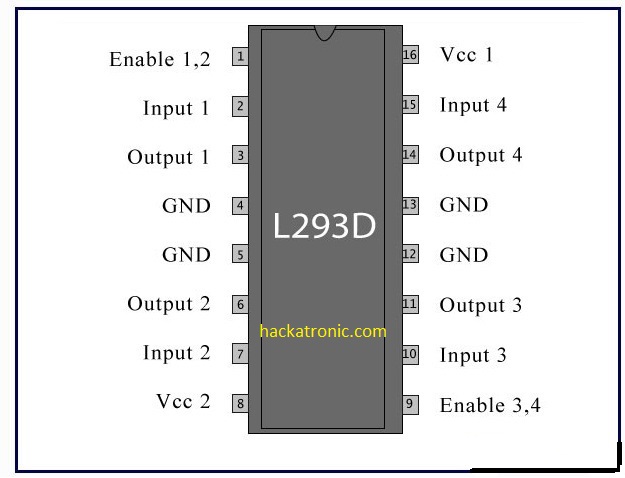
IC L293D adlah IC yang didesain khusus sebagai driver motor DC dan dapat dikendalikan dengan rangkaian TTL maupun mikrokontroler. Motor DC yang dikontrol dengan driver IC L293D dapat dihubungkan ke ground maupun ke sumber tegangan positif karena di dalam driver L293D sistem driver yang digunakan adalah totem pool. Dalam 1 unit chip IC L293D terdiri dari 4 buah driver motor DC yang berdiri sendiri sendiri dengan kemampuan mengalirkan arus 1 Ampere tiap drivernya. Sehingga dapat digunakan untuk membuat driver H-bridge untuk 2 buah motor DC.
3. Motor DC

Motor DC adalah jenis motor listrik yang penggunaannya memerlukan jenis arus DC atau arus searah. Jadi pada motor DC, arus searah yang dihasilkan nantinya akan diubah menjadi energi mekanis yang berupa putaran atau gerak.
4. Ground

Ground adalah titik kembalinya arus searah atau titik kembalinya sinyal bolak balik atau titik patokan dari berbagai titik tegangan dan sinyal listrik dalam rangkaian elektronika.

3. Listing Program [kembali]
#define in1 10 //Deklarasi pin 10 sebagai input 1#define in2 9 //Deklarasi pin 9 sebagai input 2void setup() { //Semua kode dalam fungsi ini di eksekusi sekalipinMode(in1, OUTPUT); //Deklarasi in1 sebagai OUTPUTpinMode(in2, OUTPUT); //Deklarasi in2 sebagai OUTPUT
}void loop() { //Semua kode dalam fungsi ini dieksekusi berulangdigitalWrite(in1, HIGH); //in1 diberi logika 1digitalWrite(in2, LOW); //in2 diberi logika 0delay(5000); //Jarak waktu 5000 ms setelah input dieksekusidigitalWrite(in1, LOW); //in1 diberi logika 0digitalWrite(in2, HIGH); //in2 diberi logika 1delay(5000); //Jarak waktu 5000 ms setelah input dieksekusi}
4. Kondisi [kembali]
5. Video Simulasi dan Prinsip Kerja [kembali]
Prinsip Kerja
Arduino Uno sebagai mikrokontroler, dimana Pin 10 dan 9 terhubung dengan input 1 dan input 2 pada motor driver. Pada motor driver, output 1 dan output 2 terhubung pada motor dc.
Untuk membuat motor berputar ke kanan, maka pada coding program Arduino Uno in 1 diset HIGH dan in 2 LOW lalu diberi delay sebesar 5000 ms atau 5 detik dan untuk membuat motor berputar ke kiri, maka pada coding program Arduino Uno in 1 diset LOW dan in 2 HIGH dan diberi delay sebesar 5 detik.
6. Analisa [kembali]
1. Analisa yang terjadi ketika pin enable floating (pin dicabut)?
Apabila pin enable dicabut maka tidak ada sumber tegangan yang mengalir pada motor driver sehingga pin in1, in2, out1, dan out2 tidak akan aktif sehingga motor dc tidak berputar.
2. Analisa ketika pin vss dicabut, apa yang terjadi pada motor?
Ketika pin vss dicabut atau tidak dihubungkan ke power supply, motor tetap bergerak/berputar. Karena motor driver dihubungkan ke baterai, sehingga motor mendapatkan sumber tegangan tambahan untuk bergerak. Jadi, ketika vss dicabut motor tetap akan bergerak.
3. Analisa yang terjadi jika pin enable terhubung ke GND?
Ketika pin enable terhubung ke ground (0V) maka motor tidak akan berputar karena pada pin enable tidak ada tegangan yang mengalir untuk mengaktifkan pin in1, in2, out1, dan out2.
Tidak ada komentar:
Posting Komentar