1. Komponen [kembali]
1. Arduino Uno

Arduino Uno adalah board mikrokontroler berbasis ATmega328 (datasheet). Memiliki 14 pin input dari output digital dimana 6 pin input tersebut dapat digunakan sebagai output PWM dan 6 pin input analog, 16 MHz osilator kristal, koneksi USB, jack power, ICSP header, dan tombol reset. Untuk mendukung mikrokontroler agar dapat digunakan, cukup hanya menghubungkan Board Arduino Uno ke komputer dengan menggunakan kabel USB atau listrik dengan AC yang-ke adaptor-DC atau baterai untuk menjalankannya.
2. Motor Driver
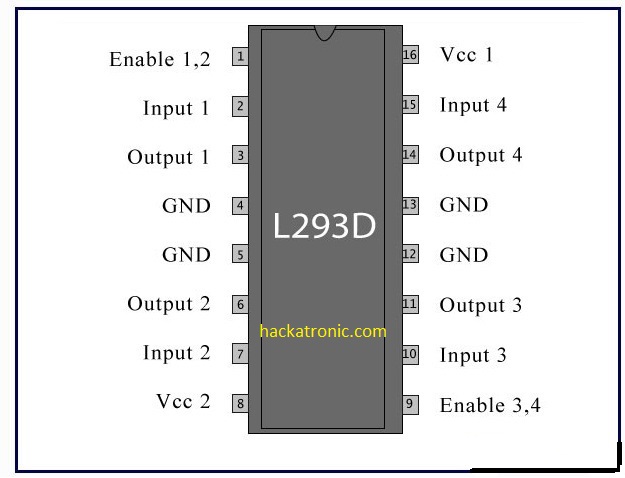
IC L293D adlah IC yang didesain khusus sebagai driver motor DC dan dapat dikendalikan dengan rangkaian TTL maupun mikrokontroler. Motor DC yang dikontrol dengan driver IC L293D dapat dihubungkan ke ground maupun ke sumber tegangan positif karena di dalam driver L293D sistem driver yang digunakan adalah totem pool. Dalam 1 unit chip IC L293D terdiri dari 4 buah driver motor DC yang berdiri sendiri sendiri dengan kemampuan mengalirkan arus 1 Ampere tiap drivernya. Sehingga dapat digunakan untuk membuat driver H-bridge untuk 2 buah motor DC.
3. Motor DC

Motor DC adalah jenis motor listrik yang penggunaannya memerlukan jenis arus DC atau arus searah. Jadi pada motor DC, arus searah yang dihasilkan nantinya akan diubah menjadi energi mekanis yang berupa putaran atau gerak.
4. Potensiometer

Potentiometer atau potensiometer adalah resistor tiga terminal dengan sambungan geser yang membentuk pembagi tegangan yang nilai resistansinya dapat diatur sesuai keinginan. Potensiometer termasuk salahsatu jenis variable resistor (resistor yang daat diubah-ubah nilai resistansinya). Secara struktur, potensiometer terdiri dari 3 kaki terminal dengan sebuah shaft atau tuas yang berfungsi sebagai pengaturnya. 3 terminal tersebut terbagi menjadi terminal tetap dan satu terminal geser. Jika hanya dua kaki terminal yang digunakan maka terminal yang digunakan adalah satu terminal tetap dan satu terminal geser.
5. Ground

Ground adalah titik kembalinya arus searah atau titik kembalinya sinyal bolak balik atau titik patokan dari berbagai titik tegangan dan sinyal listrik dalam rangkaian elektronika.

#define in1 10 //Deklarasi pin 10 sebagai input 1#define in2 9 //Deklarasi pin 9 sebagai input 2void setup() { //Semua kode dalam fungsi ini di eksekusi sekalipinMode(in1, OUTPUT); //Deklarasi in1 sebagai OUTPUTpinMode(in2, OUTPUT); //Deklarasi in2 sebagai OUTPUT
}void loop() { //Semua kode dalam fungsi ini dieksekusi berulangdigitalWrite(in1, HIGH); //in1 diberi logika 1digitalWrite(in2, LOW); //in2 diberi logika 0delay(5000); //Jarak waktu 5000 ms setelah input dieksekusidigitalWrite(in1, LOW); //in1 diberi logika 0digitalWrite(in2, HIGH); //in2 diberi logika 1delay(5000); //Jarak waktu 5000 ms setelah input dieksekusi}
4. Kondisi [kembali]
5. Video Simulasi dan Prinsip Kerja [kembali]
Prinsip Kerja
Arduino Uno sebagai mikrokontroler, dimana Pin 10 dan 9 terhubung dengan input 1 dan input 2 pada motor driver. Pada motor driver, output 1 dan output 2 terhubung pada motor dc. Potensiometer dihubungkan dengan vcc dan ground.
Dikondisi ini, potensiometer disetting ke kiri 0%, sehingga motor tidak berputar karena hambatannya besar. Namun ketika potensiometer diputar ke kanan 100% motor berputar semakin cepat. Oleh karena itu, pada percobaan ini potensiometer dapat mengatur kecepatan motor.
6. Analisa [kembali]
1. Analisa pengaruh potensiometer terhadap kecepatan motor dc?
Potensiometer berfungsi untuk mengatur hambatan sehingga akan berdampak langsung pada arus yang akan mengalir pada rangkaian motor. Ketika potensiometer diputar ke kiri atau diset ke variabel hambatan terbesar sehingga arus yang keluar sama dengan nol (0A), maka motor tidak berputar atau bergerak. Semakin kecil variabel hambatan pada potensiometer, maka motor akan berputar semakin cepat. Oleh karena itu, dapat disimpulkan potensiometer dapat mengatur kecepatan putar motor.
2. Hitung Vout, Ton, Toff, jika Vin = 5 V, Duty Cycle = 60 %, frekuensi = 50 Hz, dan analisa pengaruh Duty Cycle terhadap kecepatan motor.
Vout = Duty Cycle x Vin
Duty Cycle berbanding lurus dengan Vout. Pengaruh Duty Cycle terhadap kecepatan motor, yaitu semakin besar Duty Cycle maka Vout akan semakin besar sehingga motor akan berputar semakin cepat. Sebaliknya, semakin kecil Duty Cycle maka Vout juga akan semakin kecil yang menyebabkan perputaran motor melambat.
Tidak ada komentar:
Posting Komentar